This document discusses techniques for segmenting independently moving image regions using motion detection. It covers the following approaches:
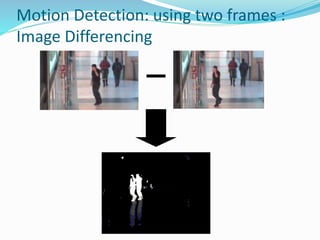
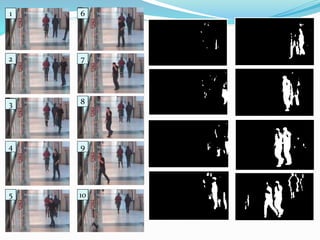
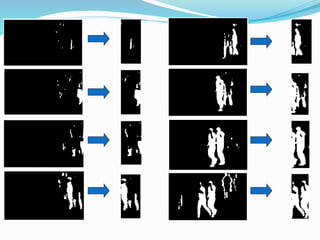
1. Motion-based segmentation using optical flow to detect pixel-level motion between frames. This approach has limitations due to the aperture and occlusion problems.
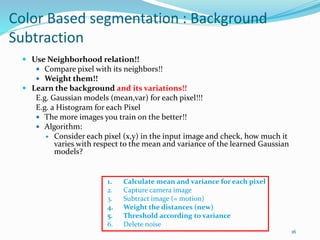
2. Color-based and texture-based segmentation which learn background models (e.g. histograms or Gaussian distributions) for each pixel and detect foreground objects that differ significantly from the background models.
3. Dominant motion segmentation fits a single motion model to partition a frame into regions of global and local motion. Multiple motion segmentation estimates multiple motion models competing at each pixel.