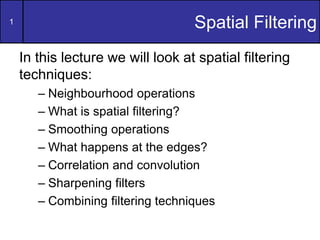
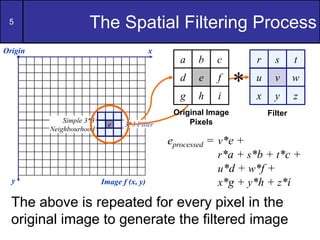
1. Spatial filtering techniques include neighbourhood operations, smoothing filters, sharpening filters, and combining filtering techniques. Neighbourhood operations operate on pixels surrounding a central pixel.
2. Simple neighbourhood operations include minimum, maximum, and median filters. Smoothing filters average pixel values in a neighbourhood to reduce noise while preserving edges.
3. Convolution and correlation are similar operations that involve multiplying a filter kernel with pixels in an image neighbourhood. Convolution involves flipping the filter kernel before multiplication.

![3 Simple Neighbourhood Operations
Some simple neighbourhood operations
include:
– Min: Set the pixel value to the minimum in
the neighbourhood
– Max: Set the pixel value to the maximum in
the neighbourhood
– Median: The median value of a set of
numbers is the midpoint value in that set (e.g.
from the set [1, 7, 15, 18, 24] 15 is the
median). Sometimes the median works better
than the average](https://image.slidesharecdn.com/05spatialfiltering-230424143426-f7742dd6/85/05_Spatial_Filtering-ppt-3-320.jpg)












![18
Spatial smoothing and image
approximation (cont...)
Example x[n] 1 1 1 1 1 2 2 2 2 2
Impulse
noise
x[n] 1 3 1 1 1 2 3 2 2 3
Median
(N=3) x[n] - 1 1 1 1 2 2 2 2 -
Average
(N=3)
x[n] - 1.7 1.7 1 1.3 2 2.3 2.3 2.2 -
edge
The edge is smoothed](https://image.slidesharecdn.com/05spatialfiltering-230424143426-f7742dd6/85/05_Spatial_Filtering-ppt-18-320.jpg)




![3 Simple Neighbourhood Operations
Some simple neighbourhood operations
include:
– Min: Set the pixel value to the minimum in
the neighbourhood
– Max: Set the pixel value to the maximum in
the neighbourhood
– Median: The median value of a set of
numbers is the midpoint value in that set (e.g.
from the set [1, 7, 15, 18, 24] 15 is the
median). Sometimes the median works better
than the average](/p?url=https%3A%2F%2Fimage.slidesharecdn.com%2F05spatialfiltering-230424143426-f7742dd6%2F85%2F05_Spatial_Filtering-ppt-3-320.jpg&__src=https%3A%2F%2Fwww.slideshare.net%2Fslideshow%2F05spatialfilteringppt%2F257541972&__type=image)














![18
Spatial smoothing and image
approximation (cont...)
Example x[n] 1 1 1 1 1 2 2 2 2 2
Impulse
noise
x[n] 1 3 1 1 1 2 3 2 2 3
Median
(N=3) x[n] - 1 1 1 1 2 2 2 2 -
Average
(N=3)
x[n] - 1.7 1.7 1 1.3 2 2.3 2.3 2.2 -
edge
The edge is smoothed](/p?url=https%3A%2F%2Fimage.slidesharecdn.com%2F05spatialfiltering-230424143426-f7742dd6%2F85%2F05_Spatial_Filtering-ppt-18-320.jpg&__src=https%3A%2F%2Fwww.slideshare.net%2Fslideshow%2F05spatialfilteringppt%2F257541972&__type=image)

















































![68 The Laplacian (cont…)
So, the Laplacian can be given as follows:
We can easily build a filter based on this
)
,
1
(
)
,
1
(
[
2
y
x
f
y
x
f
f
)]
1
,
(
)
1
,
(
y
x
f
y
x
f
)
,
(
4 y
x
f
0 1 0
1 -4 1
0 1 0](/p?url=https%3A%2F%2Fimage.slidesharecdn.com%2F05spatialfiltering-230424143426-f7742dd6%2F85%2F05_Spatial_Filtering-ppt-68-320.jpg&__src=https%3A%2F%2Fwww.slideshare.net%2Fslideshow%2F05spatialfilteringppt%2F257541972&__type=image)




![73 Simplified Image Enhancement
The entire enhancement can be combined
into a single filtering operation
)
,
1
(
)
,
1
(
[
)
,
( y
x
f
y
x
f
y
x
f
)
1
,
(
)
1
,
(
y
x
f
y
x
f
)]
,
(
4 y
x
f
f
y
x
f
y
x
g 2
)
,
(
)
,
(
)
,
1
(
)
,
1
(
)
,
(
5 y
x
f
y
x
f
y
x
f
)
1
,
(
)
1
,
(
y
x
f
y
x
f](/p?url=https%3A%2F%2Fimage.slidesharecdn.com%2F05spatialfiltering-230424143426-f7742dd6%2F85%2F05_Spatial_Filtering-ppt-73-320.jpg&__src=https%3A%2F%2Fwww.slideshare.net%2Fslideshow%2F05spatialfilteringppt%2F257541972&__type=image)









![83 Example: Gradient Magnitude Image
Gradient Magnitude
(isotropic, i.e.,
edges in all directions)
• The gradient magnitude can be visualized as an image by mapping
the values to [0, 255]](/p?url=https%3A%2F%2Fimage.slidesharecdn.com%2F05spatialfiltering-230424143426-f7742dd6%2F85%2F05_Spatial_Filtering-ppt-83-320.jpg&__src=https%3A%2F%2Fwww.slideshare.net%2Fslideshow%2F05spatialfilteringppt%2F257541972&__type=image)